In the past five months, the 3D model of Mimas had several changes: the design was updated continuously to improve the similarity with Perseverance and Curiosity. However, some parts are constrained due to the shapes of the electronic components and the chosen motors. The rendering shown below is the most complete ever made for now: the shape and material are as close as possible to the real look Mimas will have. Surely, additional updates will be made to this model to increase its realistic look and amount of detail.
- [Hours of work: 6h]
- [People involved: Giorgio]
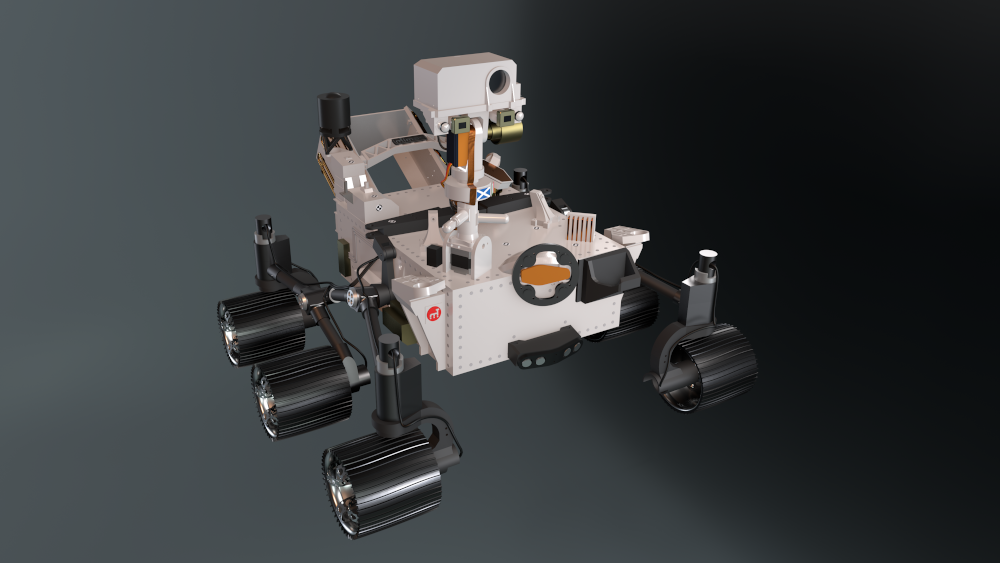








![![enter image description here][1]](https://www.computerangels.net/mimas/content/images/20221017120850-03102022.jpg)