Real-time simulations using Blender and Python
 Watch: Aurora Rover: Real-time simulation using Blender and Python
Watch: Aurora Rover: Real-time simulation using Blender and Python
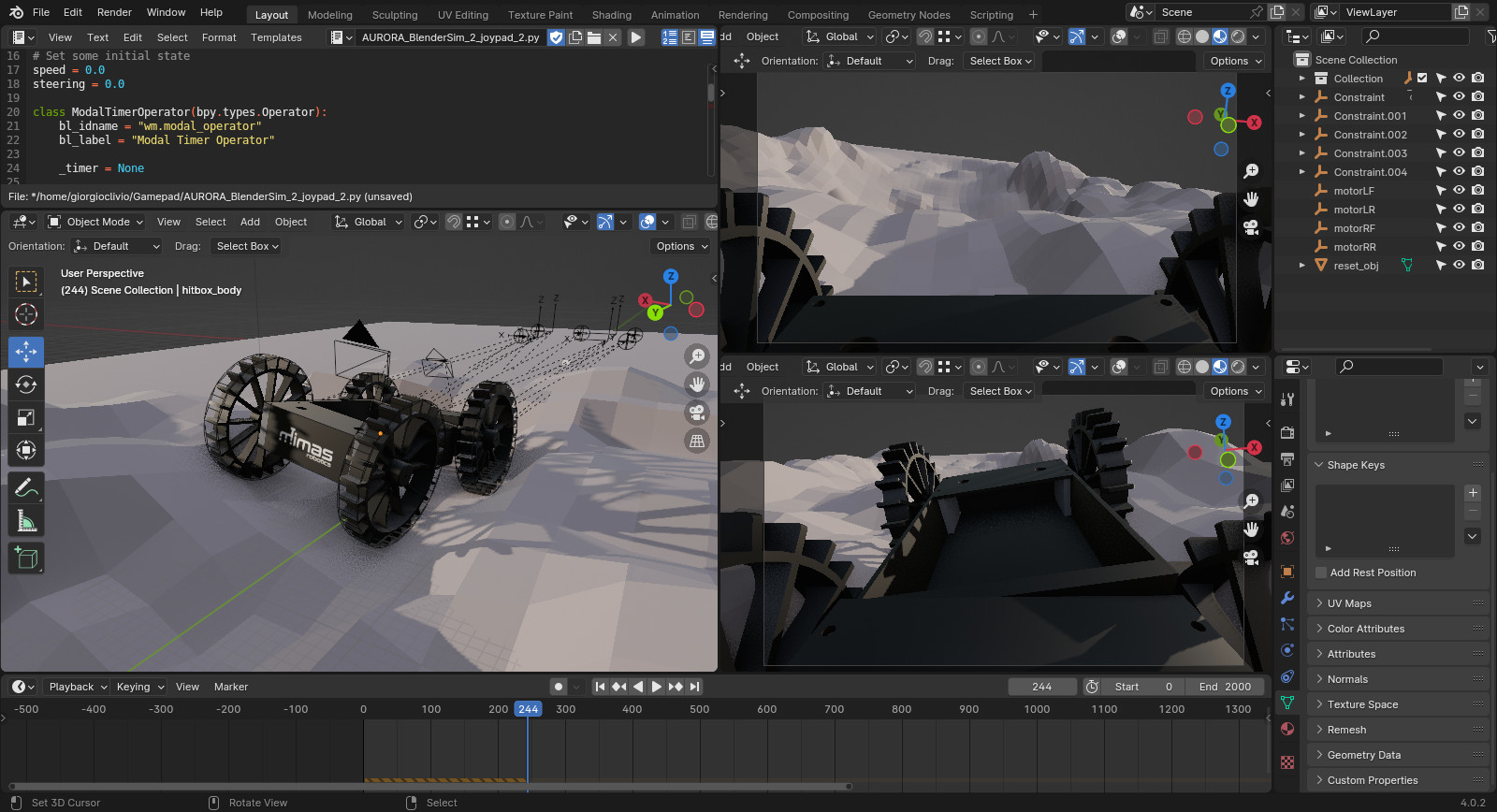
In robotics, real-time simulations are invaluable for testing and refining algorithms, control strategies, and overall system behaviour before deploying solutions to physical robots. I have almost 10 years of experience with Blender, so I decided to use this software, instead of Gazibo or other similar tools. Blender, with its powerful real-time simulation capabilities and powerful render engine, allowed me to interactively control and visualize a robot's movements in a simulated environment allowing me to rapidly iterate on designs, experiment with various scenarios, and fine-tune control parameters in real time. Using a single software for designing the robot, making renderings and animations, but also run physically accurate simulations, not only accelerates the development cycle but also facilitates a seamless transition from simulation to physical implementation.