Walking instead of driving
Background: Nowadays, we are quite used to seeing walking robots. Both companies and independent engineers tried to build their own at various levels of complexity. Some of the most well-known are Boston Dynamics’ Spot, MIT’s Cheetah, Unitree Robotics’ Laikago, ANYbotics’ ANYmal, etc. They are all designed for on-Earth applications. Instead, the list of existing walking robots for Space exploration is limited to ETH’s SpaceBok, JPL’s LEMUR, FZI’s Lauron V, and a few others. Most of these robots are hexapods or other ways inspired by arthropods' shapes. Interestingly, before choosing wheeled rovers as a valid option for exploring Mars, it looks like NASA was interested in walking robots as well. In 1989, under a contract with NASA's Jet Propulsion Laboratory, Martin Marietta developed several alternative rover concepts for unmanned exploration of the planet Mars. One of those concepts, the 'Walking Beam', is the subject of this paper, also referred to as Martin Marietta beam walker rover. Unfortunately, only a few pieces of information are available about it online. According to the design, the walking rover used two platforms that alternately translate one with respect to the other, to propel it. There were seven legs, all of which actuate in the vertical direction only. The legs were grouped into two sets: a quadruped inner base supporting the lower payload assembly, and a tripod outer base supporting the beam assembly. In addition to the seven legs, there was a translation system for locomotion and a rotation system for steering. In total, there were nine actuators, one for each of the degrees of freedom.
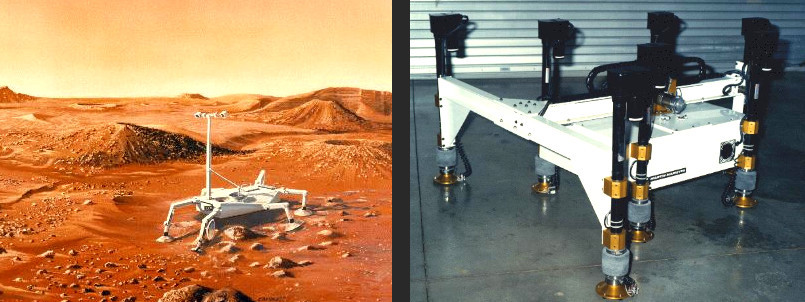
Comment: Despite the clear absence of flexibility and natural dynamics, the Martin Marietta beam walker rover shows some interesting features. The body is suspended from the ground thanks to some legs that alternate their position keeping the robot in a mechanically stable position at each movement. A set of cameras (and presumably of sensors) is located on a tower much higher than the robot body. I found these images on an old JPL archive about the Pathfinder mission, together with a collection of pictures of the Sojourner rover. From this, I can deduce that NASA is (or at least, was) interested in walking robots for exploring Mars. What happened then? Maybe they realised wheels are much more manageable and ideal in terms of power consumption (a critical aspect of planetary exploration). So, there must be a great reason for using legs instead of wheels, a reason good enough to close an eye on its low efficiency in terms of energy.