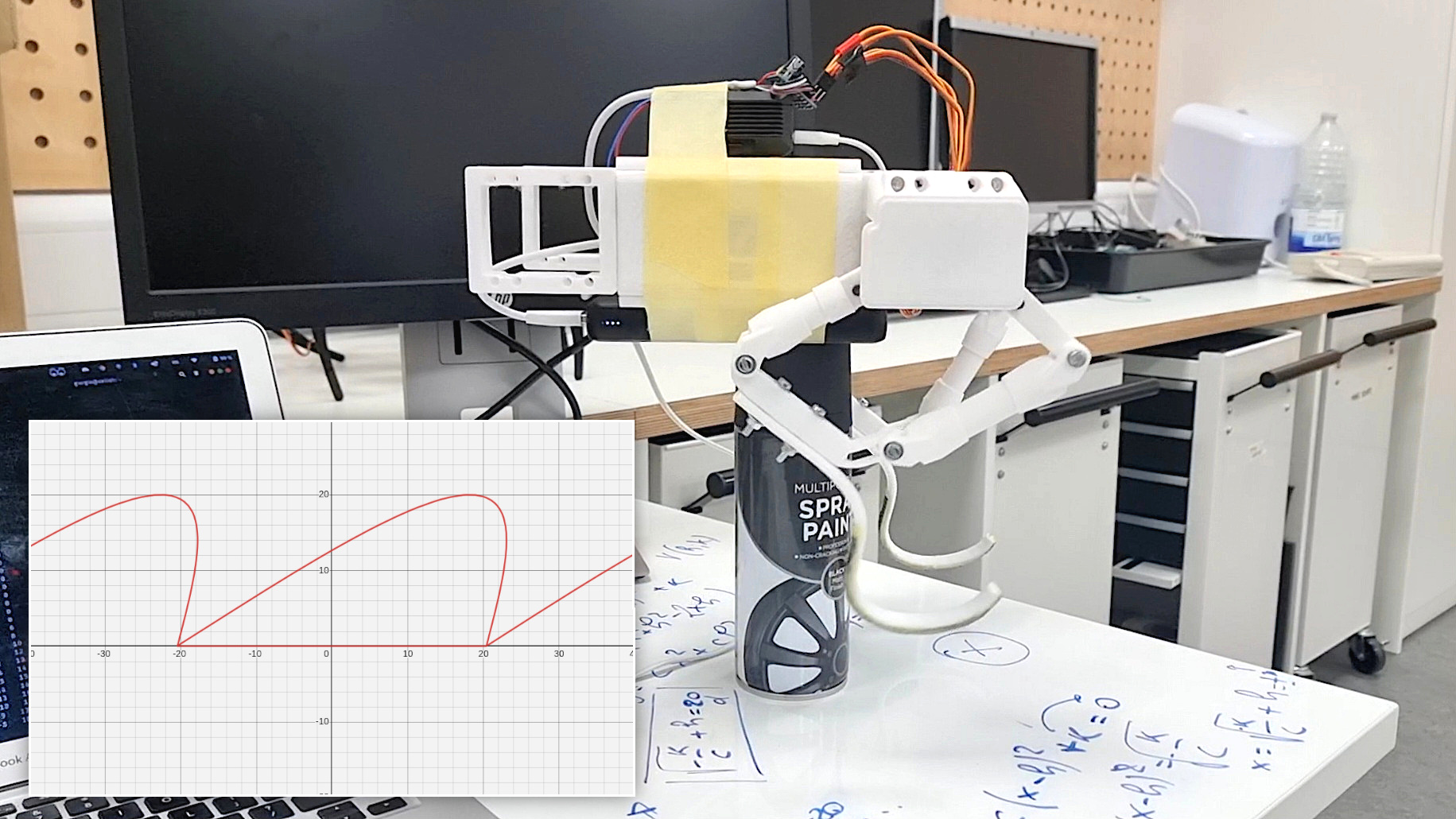
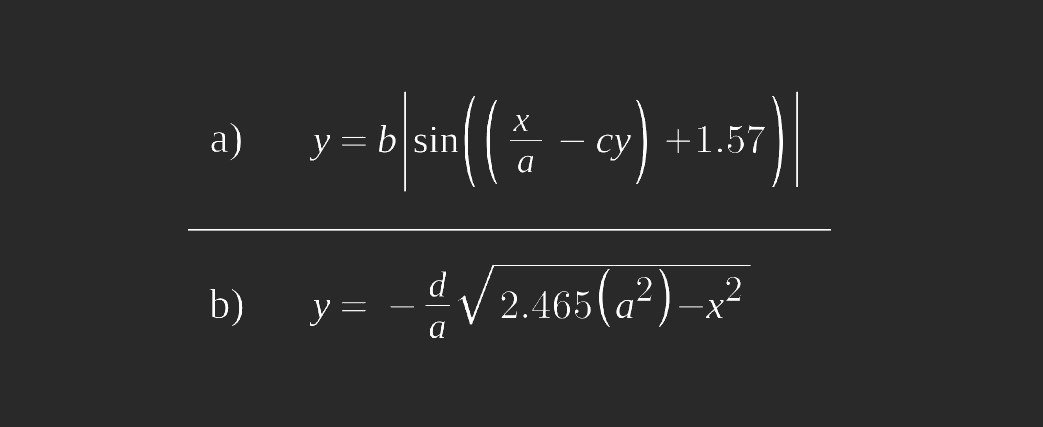
After ensuring a strong enough structure and sufficient current to power the motors, efforts were dedicated to refining the walk cycle of a single leg. Until this point, legs moved along predefined coordinates defined manually, making the movements quite clucky. I decided to avoid inverse kinematics calculations to reduce processing time and resources: this should leave more available memory to the RPi4 for Computer Vision tasks. So, I preferred using forward kinematics, finding a relation between the angles and end effector of the legs. I decided to make the end effector move along a precisely defined curve. This curve comprises two interconnected segments: the upper curve (a), similar (but not) a parabola, and its counterpart below (b), completing a seamless loop.
 One of the standout features of this approach lies in its adaptability. The parameters of the functions governing the two curves can be fine-tuned, allowing for the creation of diverse step shapes. Whether it's a stable, measured gait or a more dynamic stride, adjusting these parameters provides versatile options. Furthermore, the execution speed of each step is a customizable element, adding another layer of control to the robot's locomotion.
One of the standout features of this approach lies in its adaptability. The parameters of the functions governing the two curves can be fine-tuned, allowing for the creation of diverse step shapes. Whether it's a stable, measured gait or a more dynamic stride, adjusting these parameters provides versatile options. Furthermore, the execution speed of each step is a customizable element, adding another layer of control to the robot's locomotion.