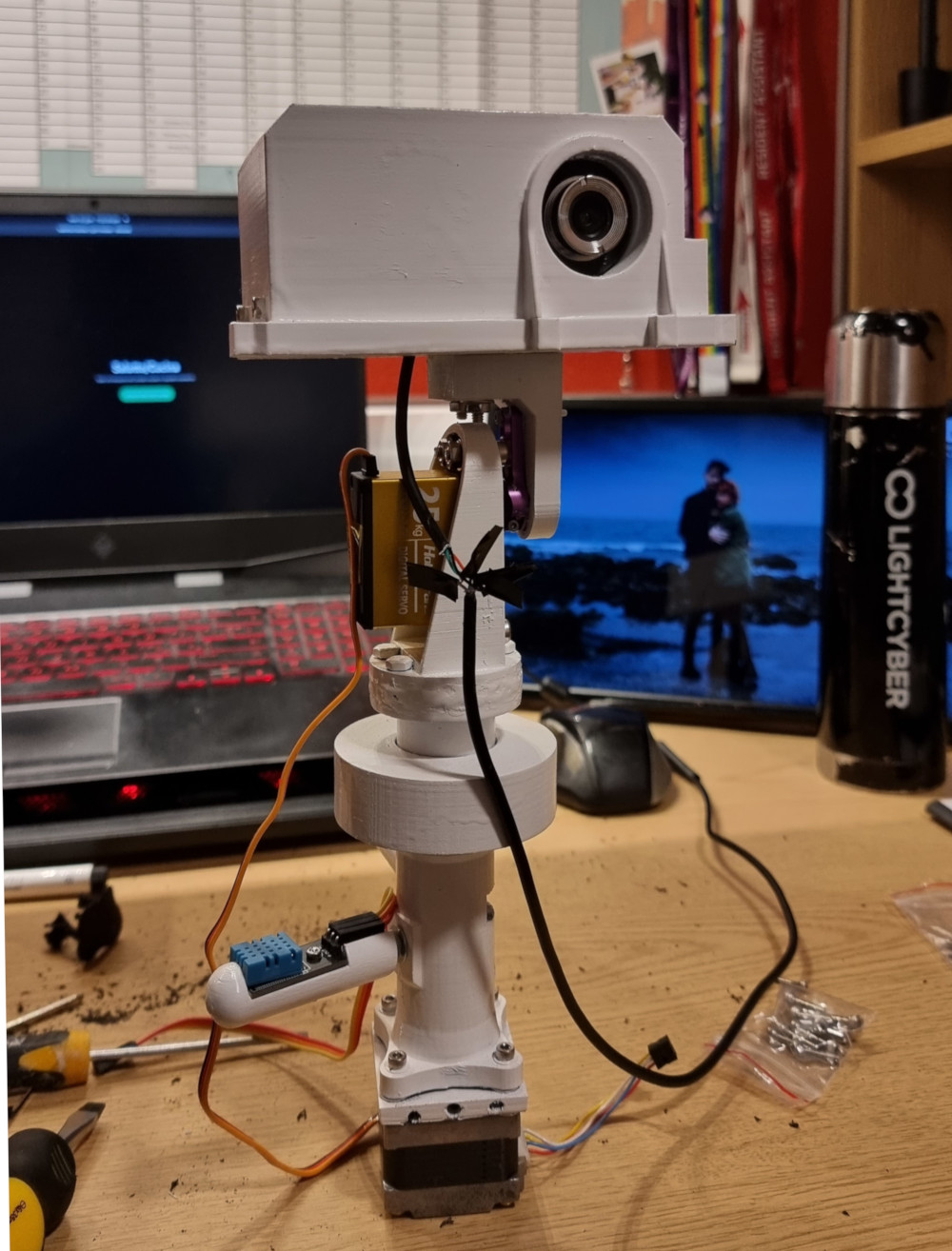
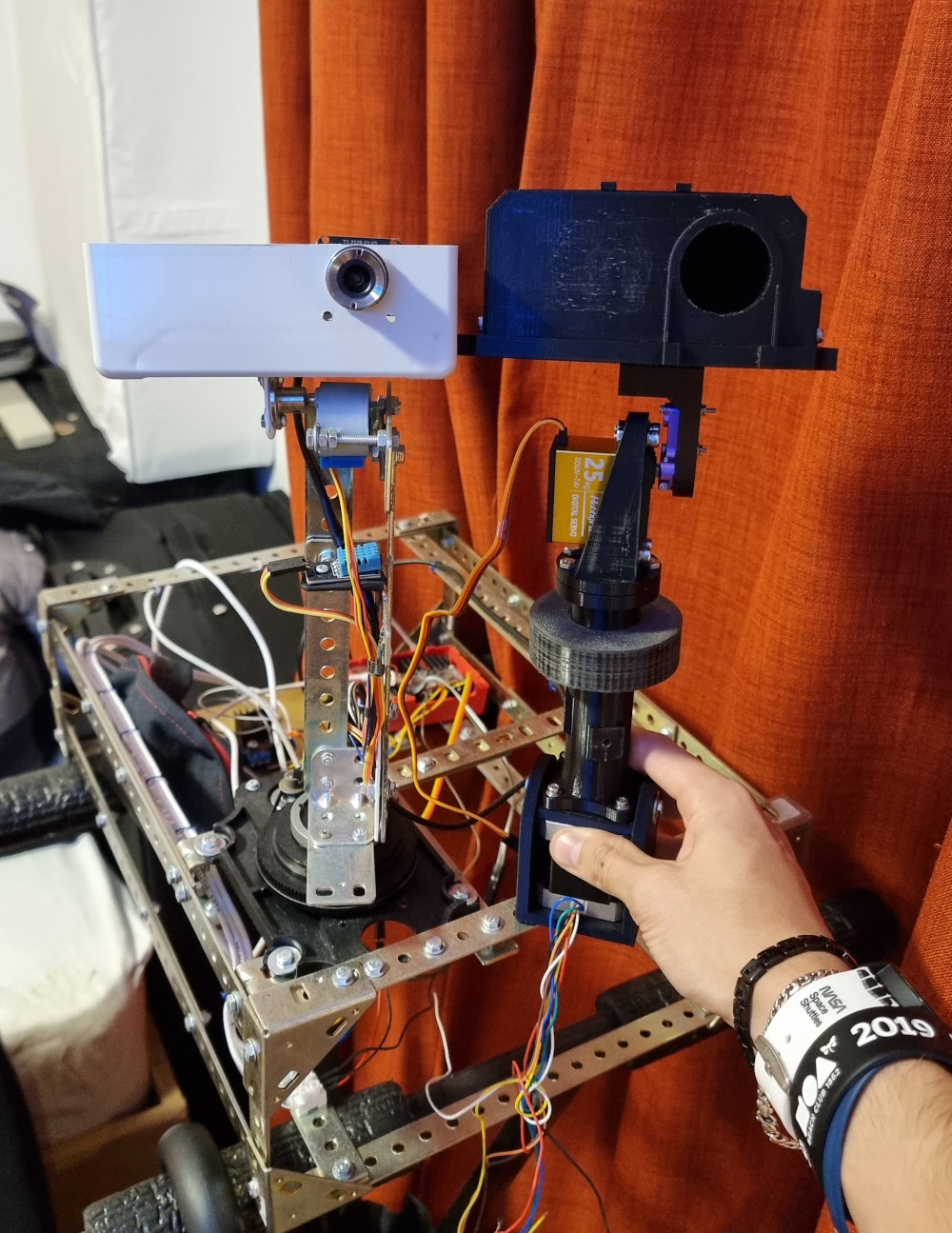
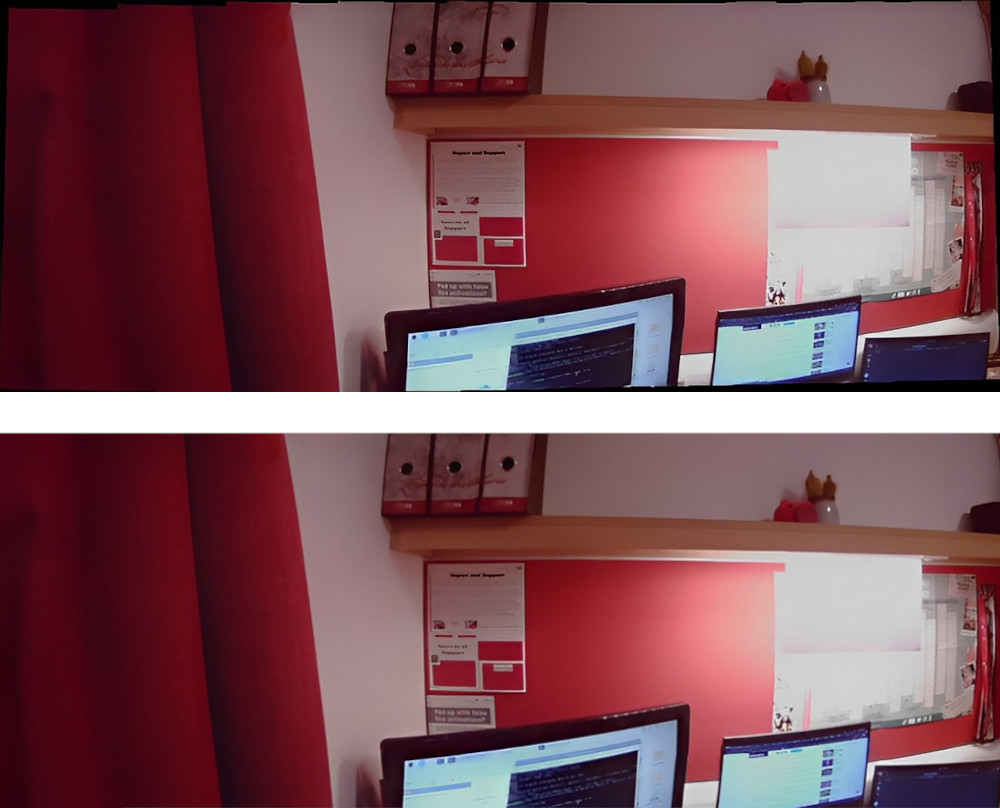
Since July 2022, the Mast Tower v.1 has had a cheap 720p webcam installed at the top, operating as the "Imager". When the time has come to choose the camera for the Mast Tower v.2, originally a 1080p camera or 2K camera was considered. However, the purchase has been delayed for several months due to a lack of budget. In the end, it was decided to adopt a different approach: instead of buying a new camera, the hardware used for Mast Tower v.1 was moved to v.2. This choice, apart from being partially obliged due to financial needs, carries an emotional aspect: the camera inside Mast Tower v.1 passed the last 6 months on the workstation, partially abandoned, "looking" at the rover slowly but progressively being built. Now, however, it got a new life, moving from Mast Tower v.1 to Mast Tower v.2.
- [Hours of work: 2]
- [People involved: Giorgio]