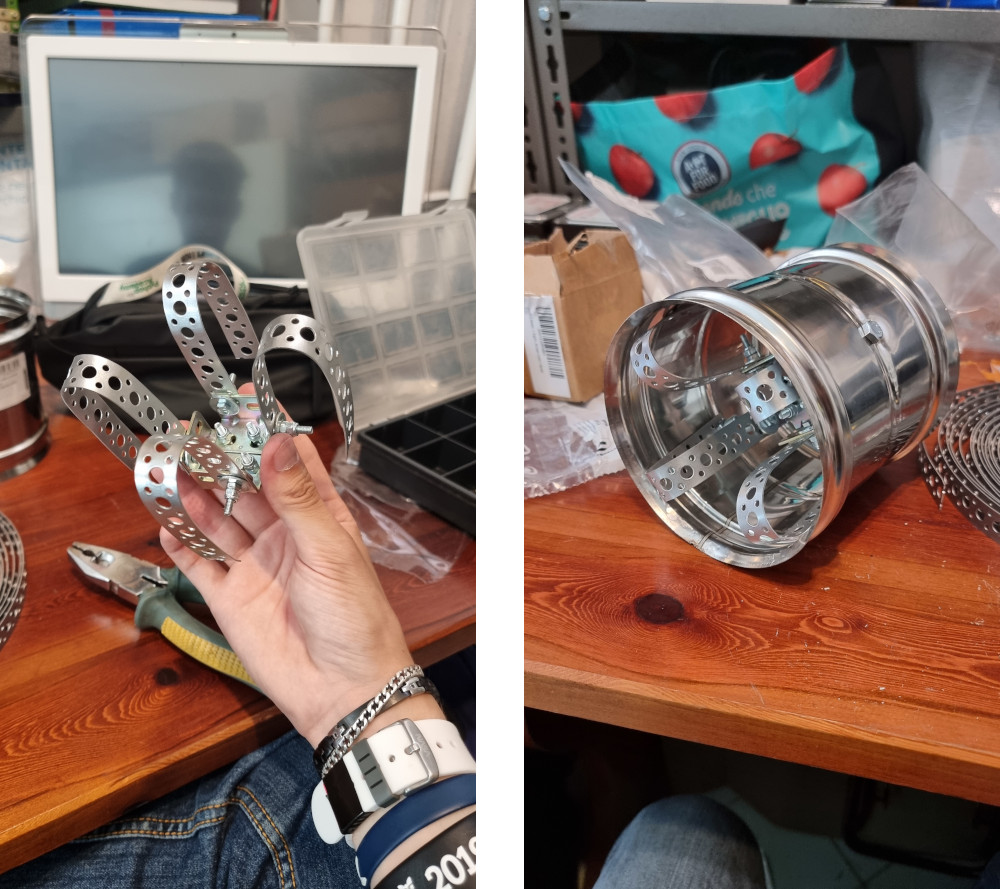
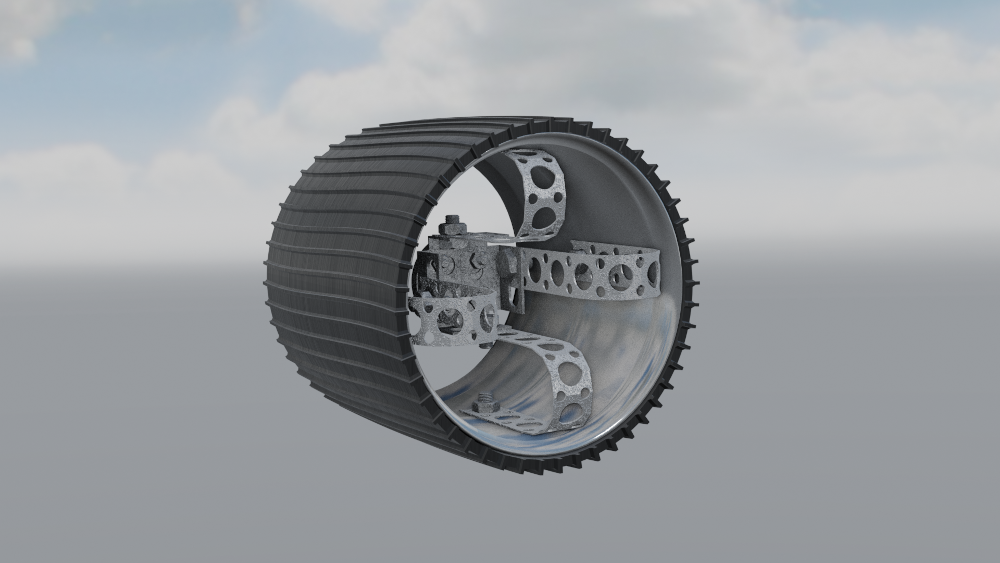
With a precise design of the final look of the wheels ready, materials for building it were purchased and assembled. The structure is composed of: 1x stainless steel cylinder for the outer frame, 4x "U" shaped stainless steel holed brackets custom bent, 4x "L" shaped stainless steel brackets. In addition, several nuts and bolts were used to make the structure strong and flexible, ready to be adjusted, if necessary, in the future. The structure of the wheel, however, is far from being completed, since it will require a cover of polyurethane rubber to protect the metal and ensure the rover has a better grip on outdoor terrains.
- [Hours of work: 3h]
- [People involved: Giorgio]