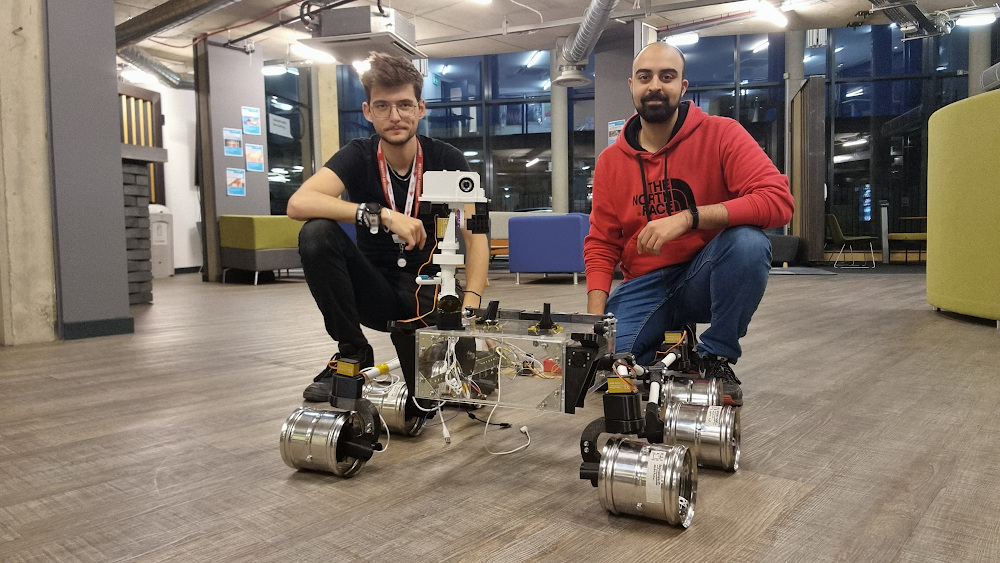
After partially disassembling the rover for the journey from Bainfield to Merchiston, it was decided to test all the components to ensure no parts have been damaged during the transfer. This was also a great occasion to test the computer vision algorithm for the first time, in an open-space environment: the lab is large enough to allow drive tests, which will be conducted in the following weeks. At the current state of things, the motors are still not wired and the only fully functional component is the Mast Tower. The "Green Lines algorithm" has been tested using a cardboard box as a rock. For the test, Mimas was placed on custom-made metal perches that keep the rover at the right height even without wheels.
- [Hours of work: 2]
- [People involved: Giorgio, Akshit]