After the assembly of the first wheel, building the five remaining wheels was straightforward: the same procedure has been used until the task was completed.
- [Hours of work: 4h]
- [People involved: Giorgio]
After the assembly of the first wheel, building the five remaining wheels was straightforward: the same procedure has been used until the task was completed.
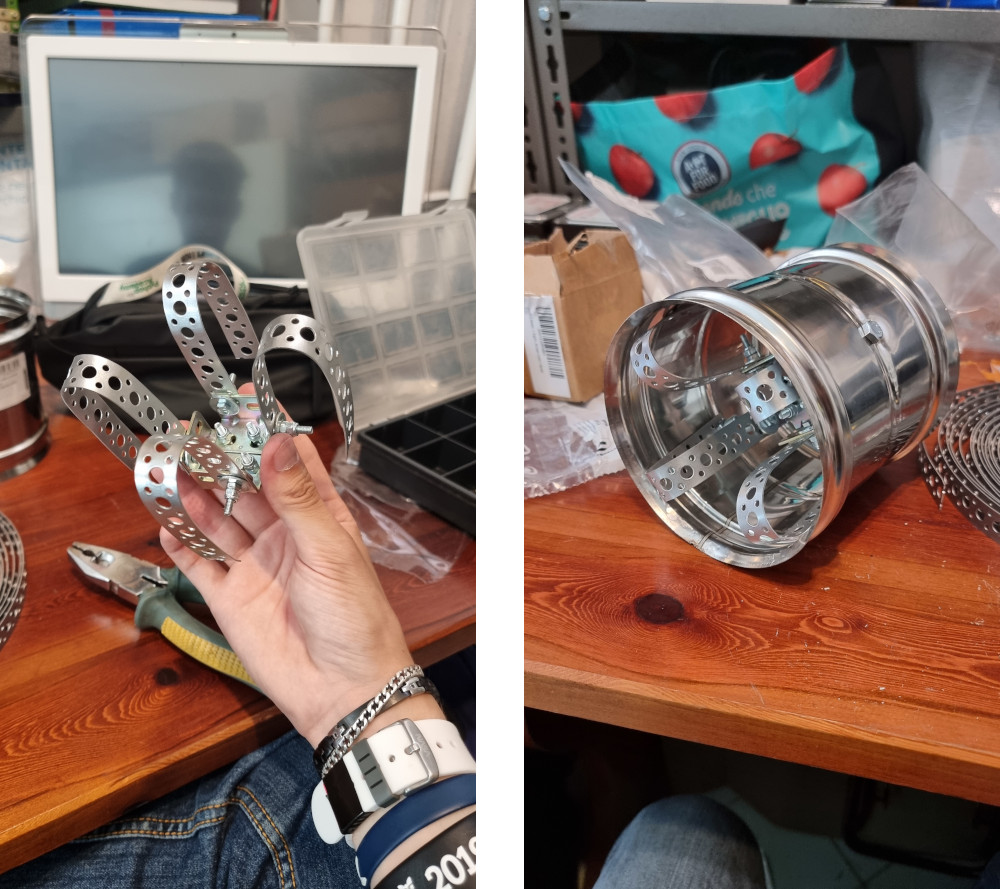
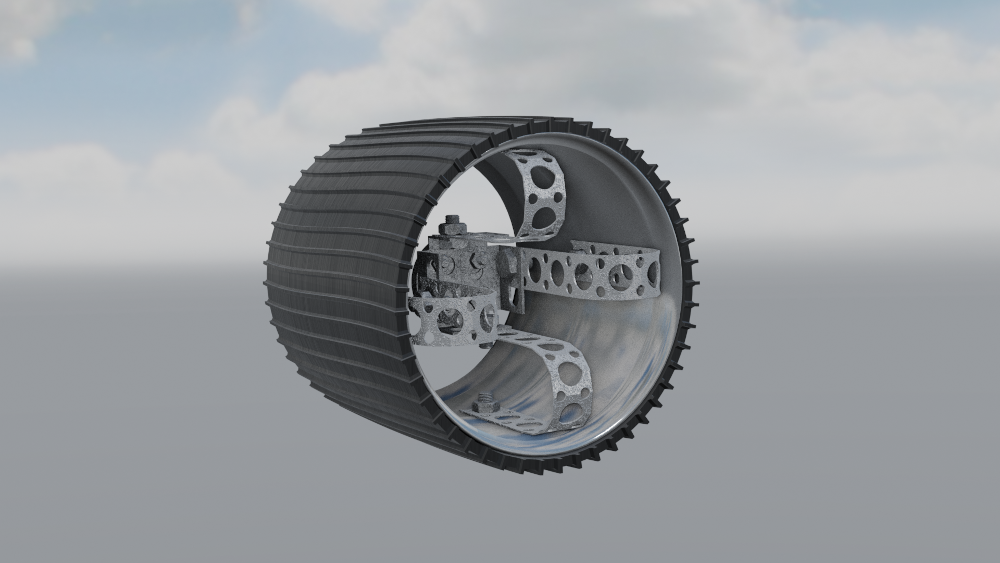
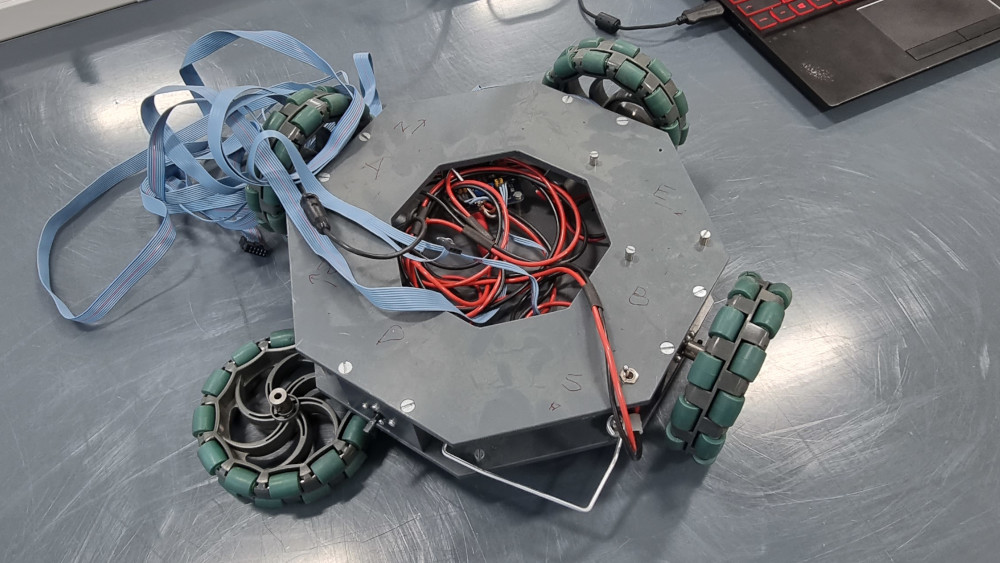
With a precise design of the final look of the wheels ready, materials for building it were purchased and assembled. The structure is composed of: 1x stainless steel cylinder for the outer frame, 4x "U" shaped stainless steel holed brackets custom bent, 4x "L" shaped stainless steel brackets. In addition, several nuts and bolts were used to make the structure strong and flexible, ready to be adjusted, if necessary, in the future. The structure of the wheel, however, is far from being completed, since it will require a cover of polyurethane rubber to protect the metal and ensure the rover has a better grip on outdoor terrains.
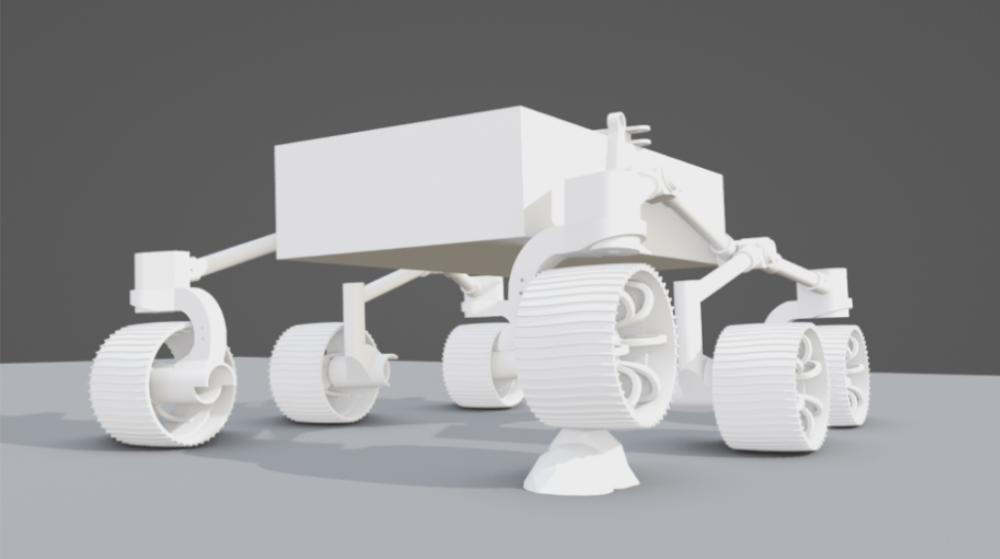
To design Mimas, two NASA/JPL Mars Rovers were taken as inspiration: Curiosity and Perseverance. They are both autonomous vehicles for planetary exploration, landed on Mars respectively in 2012 and 2021. On both rovers, the Rocker Bogie suspension system was implemented to ensure safe driving even when traversing a rough surface, covered by rocks and with different terrain compositions. A first draft of the structure was modelled in 3D using Blender, however, this design may undercome several improvements in the future. In addition, materials to assemble one of the wheels (one out of six) were purchased.
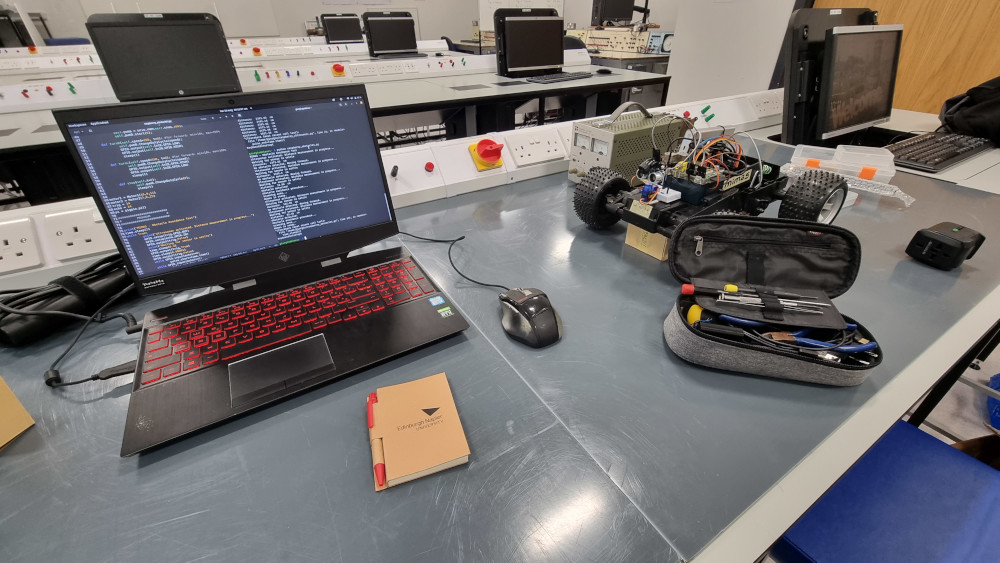
The first step to transit from the RC-VSTB to Mimas, the mars rover model prototyped for this Honours Project, was to update from a Raspberry Pi 1 to a Raspberry Pi 4 (with 8 GB of RAM) This process required a relatively small amount of time, however, particular attention was made to keeping the device as light and smooth as possible, reducing the installed libraries to what is strictly necessary.
The RC-VSTB is ready for its final test: during the five hours of testing, the team stressed the RC-VSTB with a series of obstacle displacements and dimensions, taking notes of all errors for future improvements. This final test was successfully completed. Even if the work on the RC-VSTB could continue further, adding features and improving the autonomous driving algorithm, the team decided to start focussing on designing the actual Mimas Rover.
Alongside the designing process of the Mimas Rover, computer vision experiments were carried out. A focus was made on coding an algorithm to calculate the distance of the camera from a given target, using monocular vision in OpenCV. The distance is estimated by calculating the dimension of the target and its position with respect to the centre of the frame. This algorithm will require several improvements before being actually useful for driving the Mimas Rover autonomously.
The team met up at Bainfield Student Accommodation (Edinburgh), in the Common Room, to upgrade the obstacle avoidance algorithm that runs on the RC-VSTB. Several upgrades were made and the vehicle is now almost ready for a new drive test!
The team met up in room B60 at Merchiston Campus (Edinburgh), the laboratory for AC current to work on a full draft of the obstacle avoidance algorithm. We received some spare parts from other students' projects from a lecturer: we hope we might be able to give them a new life in our final project. RC-VSTB cable management has been fixed, even if there is still plenty of space for further improvements.
Computer vision is one of the most exciting divisions of computer science, it consists of a series of operations made using Artificial Intelligence (AI) to process images and videos. From the perspective of engineering, its aim is to automate tasks that the human visual system can do. For this project, the OpenCV library is used. OpenCV is an Open Source library that can take advantage of multi-core processing and hardware acceleration. The first step made to approaching computer vision was to be able to detect colours, and geometrical shapes and compute simple tasks using data collected from a camera.
It's time for a second test of the RC-VSTB! This time it drove at full speed in the Orwell Terrace courtyard, steering without issues, controlled by SSH connection. All onboard systems worked as predicted and the test was successfully completed! Despite its similarity with a cabriolet car makes it look very nice, keeping all circuits exposed during outdoor tests might represent a potential hazard: so, a rearrangement of circuits and wires is compulsory. The next big improvement will be to implement an obstacle avoidance algorithm based on ultrasonic distance scanning.
