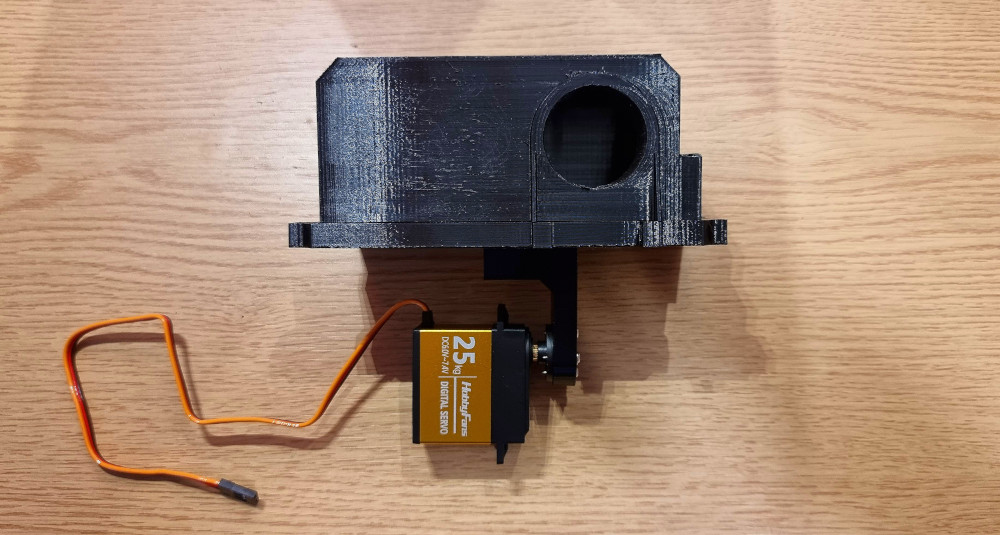
Even if the wheels were built in July, the suspension brackets needed to make them functional have always been a major point of concern. The "C" shaped brackets are crucial since the entire rover's weight relays on them: they can not make contact with the ground or with the wheels themself.
The result obtained at the end of more than 20 hours of printing, is a strong bracket that can easily handle roughly 2kg of weight.
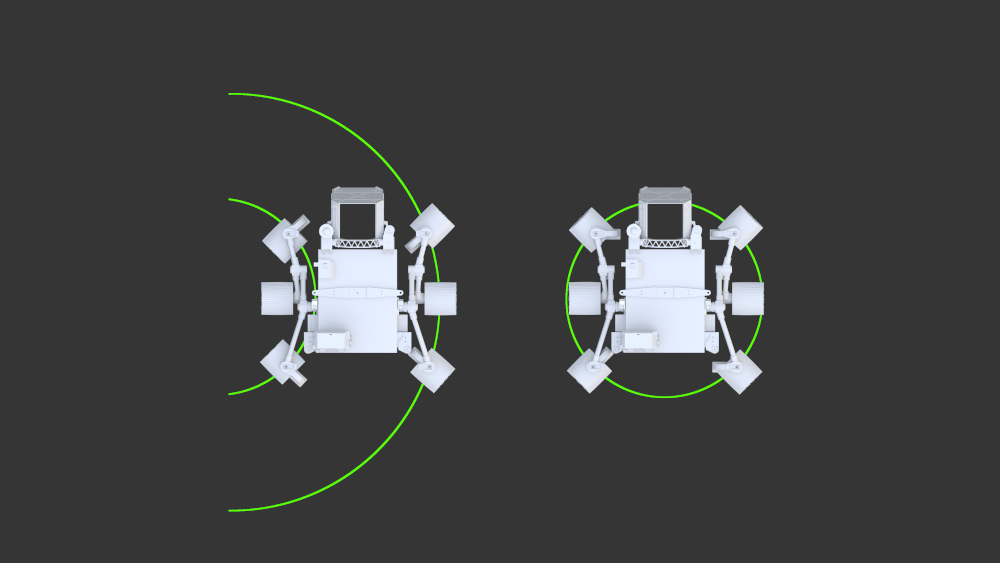
This limitation, however, can be reduced by changing the position of the "U" shaped brackets inside the wheels (wheels structure: 03/07/2022).
- [Hours of work: 1h]
- [People involved: Giorgio]






![![enter image description here][1]](https://www.computerangels.net/mimas/content/images/20221017120850-03102022.jpg)