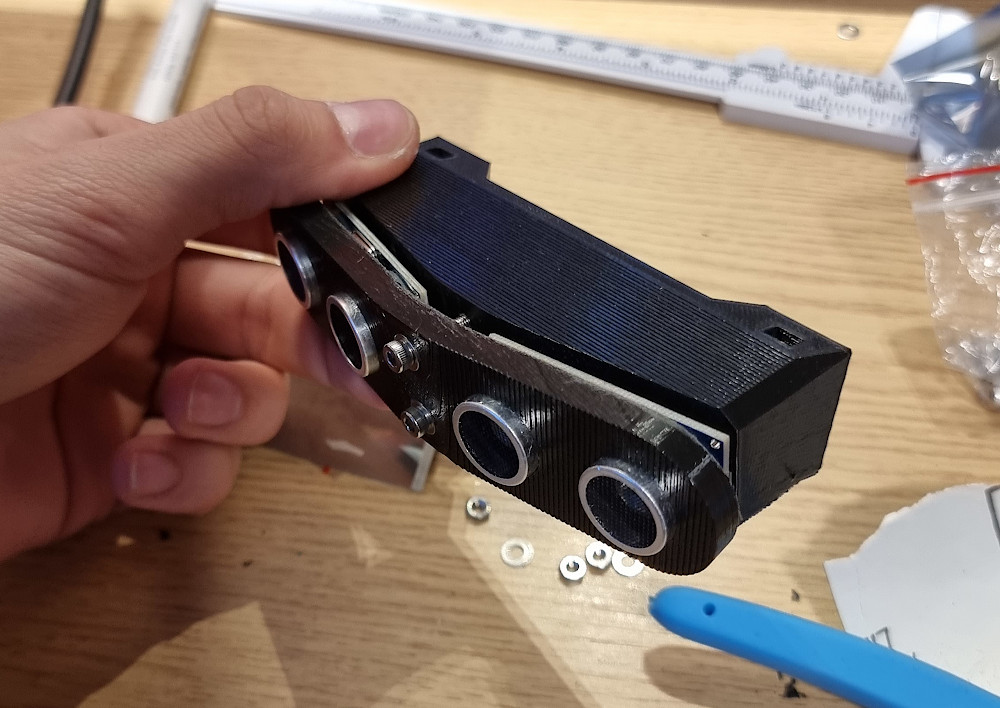
Horizontal Ultrasonic Mapping And Navigation (HUMAN) is a simple system that Mimas inherited from the RC-VSTB, on which it was the only navigation system available. The RC-VSTB was essentially driving blind, detecting obstacles using a single ultrasonic sensor. This system was definitely not accurate, but it was precise enough to avoid major hazards. On Mimas, a proper device has been designed to hold two ultrasonic sensors just in front of the rover's belly. This system would not work on Mars, since its extremely thin atmosphere does not ensure correct transmission of sound, hence correct measurements using ultrasounds. However, Mimas does not drive on Mars! So, HUMAN represents a great and cheap way to help the rover's autonomous navigation. The cameras have been tested, showing relatively low performances in dark environments, whereas ultrasonic sensors are not affected by light conditions. HUMAN cannot be used on its own, because the accuracy is too low, but it will be used to enrich the data collected by the 7 onboard cameras.
- [Hours of work: 4]
- [People involved: Giorgio]