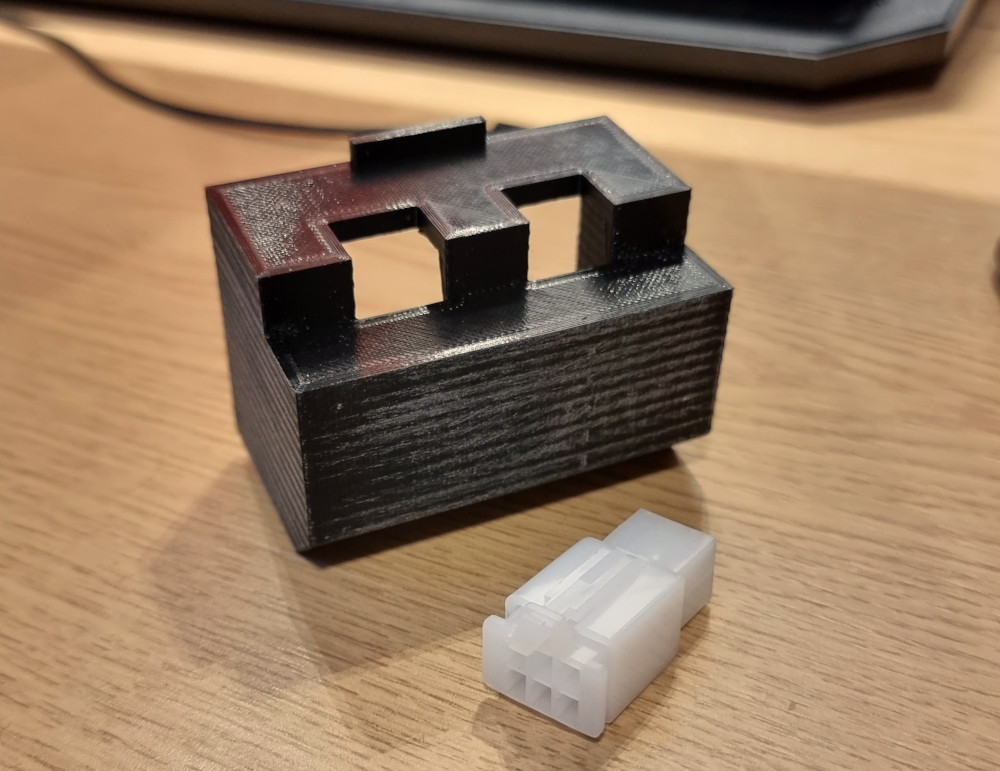
All sensors, motors and other electrical components located outside the Rover's belly, will be connected to the Raspberry Pi4 through cluster cable connectors attached to the WEB. The 3D component shown below can host up to 12 cables: 6 for the wheels on each side of the rover (each DC motor has 2 wires), and 6 for the servo motors located on top of the steering wheels (each servo motor has 3 wires).
- [Hours of work: 1h]
- [People involved: Giorgio]