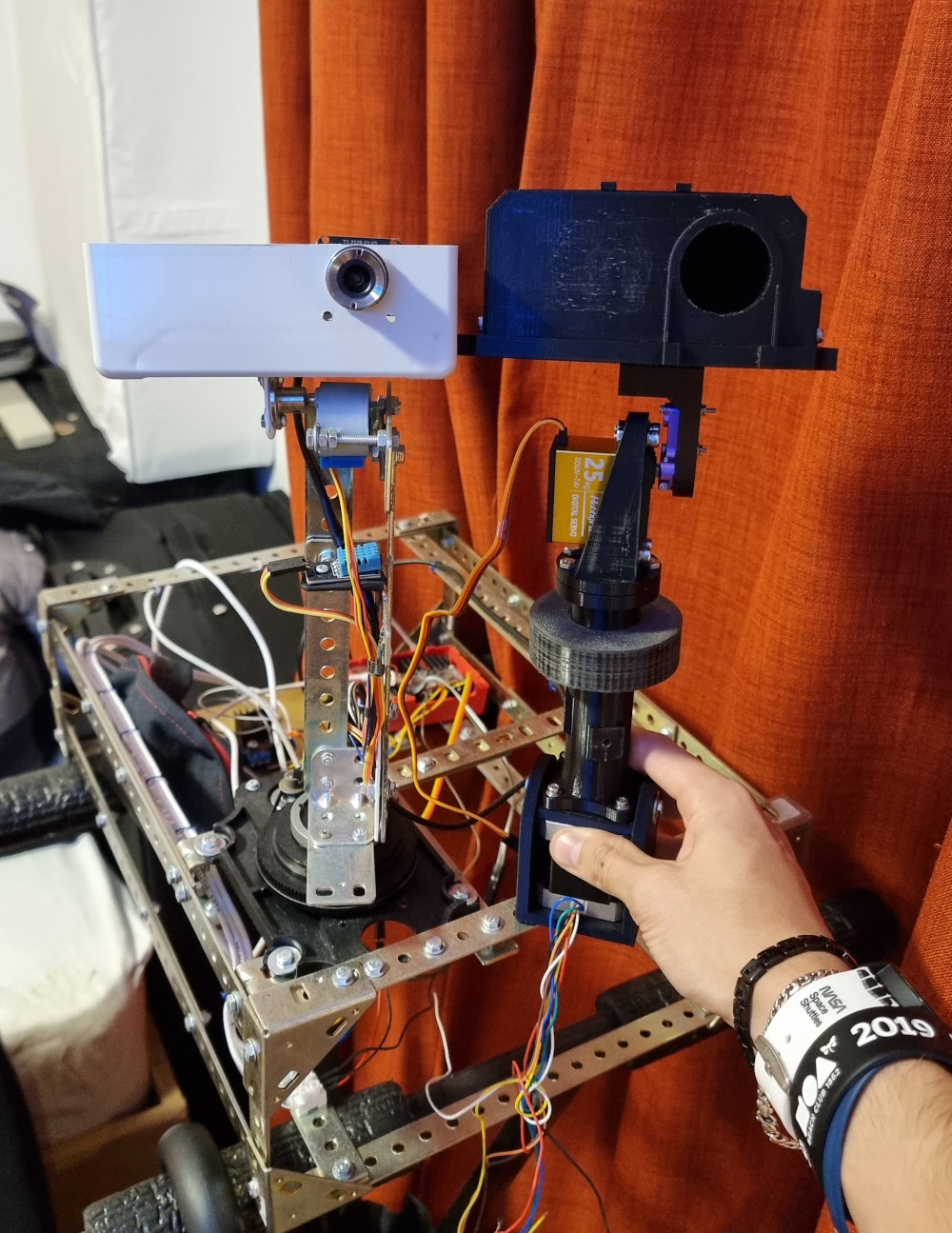
The assembly of Mimas using 3D-printed parts has finally started! Since the first working assembly of the structure made in the summer period was the Imager, that is also what was powered first! The new Mast Tower (hence the Imager) is almost entirely 3D-printed to reduce the weight: the heavier component is the 4-cables stepper motor located at the base. The stepper transfers its motion to the upper section of the tower using an M8 threaded rod connected to the motor pin using a springy metal coupler, allowing pan rotation of the cameras. This not-fully rigid assembly allows the upper section of the Imager to avoid vibrations coming from driving on uneven terrain. On the top of the tower, a 25kg of torque servo motor ensures an extremely stable tilt rotation of the cameras. At the moment, no other sensors are assembled on the Mast Tower, since their casings are still in the designing phase. The structure weight is almost the same as the previous version of the Imager, but the load is better distributed. Due to the modularity of the Python code, it is possible to control it using the same program code for the Mast Tower v.1, with just tiny changes.
- [Hours of work: 5h]
- [People involved: Giorgio]