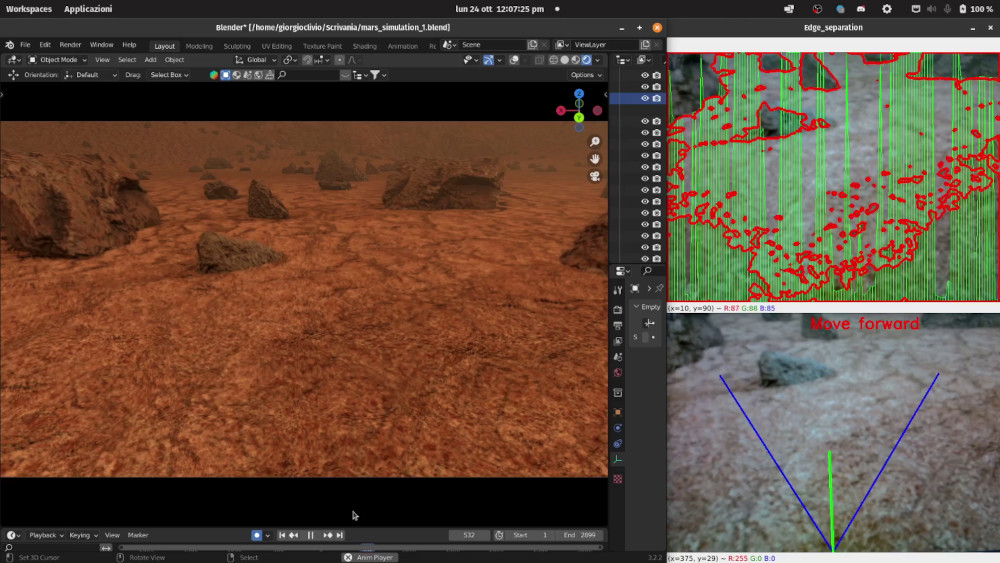
Mimas Rover will have an autonomous navigation capability and to achieve it, multiple systems will be used, one of which is the "Green Lines Algorithm" (GLA). This algorithm is still a work in progress, since June 2022. This post will not go in-depth with this algorithm since it still needs several improvements. In order to do some tests (the rover structure is not ready yet, hence a real driving test is impossible at the moment) a simulation of the Mars surface was made, modelling the terrain in Blender. Then, a webcam was placed in from of the laptop screen and the algorithm was run to test its efficiency. Despite the results are still not great and the GLA requires several improvements, the main principle of the algorithm showed to work correctly: rocks and possible hazards are detected!
- [Hours of attendance: >20h]
- [People involved: Giorgio]