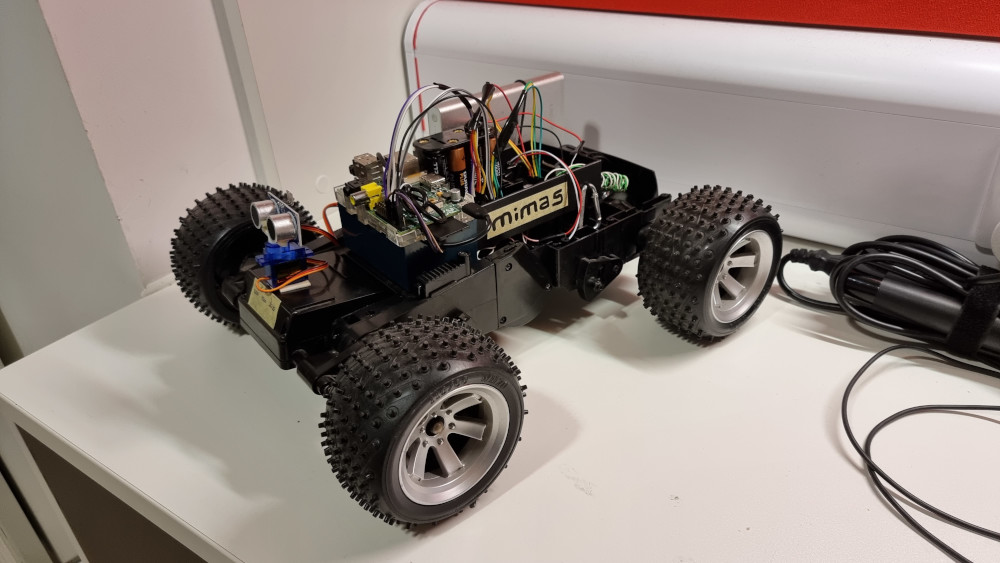
Steering is essential for driving, so it was implemented successfully on the RC-VSTB together with a draft of the code to run a servo motor: the idea is to implement an appropriate sensor (Ultrasonic Distance Sensor - HC-SR04) to calculate the distance, placing it on top of a servo motor. Using only one sensor located on a rotating base, helps the RC-VSTB consume less current and run the code easier, instead of a group of sensors individually powered and connected to the Raspberry Pi 1.
- [Hours of work: 3h]
- [People involved: Giorgio, Akshit]